
ADIS16250 ―角度侦测器芯片
时间: 2024-03-28 09:17:44 | 作者: kaiyun电竞
- 产品详情
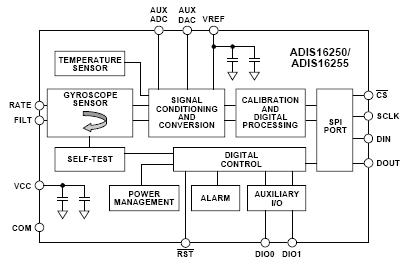
标准工作时候的温度(-40℃~+85℃),适合用于GPS侦测汽车转向的角度,在卫星没有讯号的地方如隧道或有遮蔽物无法接收卫星讯号可利用ADIS16250配合ADXL330侦测角度及车速及时显示在地图的位置。ADIS16250可选择三种灵敏度 (±80°/sec,±160°/sec,±160°/sec)透过内部的12bit化后由SIP输出
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

16550BMLZ高性能惯性测量单元(IMU)性能指标解析大家好,我是来自深圳市华沣恒霖电子的
16470物料工作起来会有电流声,测试功能是正常的。之前就没有这种情况,请问这种情况会是什么导致的?是否能正常使用
16209的时候,从来就没调试通过,读出的数据是0xFF或者0x00 我现在确认: 1)
16209上电后,RST引脚先拉低,等待10ms,然后拉高,等待200ms再进行操作
16223单轴检测值总是超过70G,请问大于70G数值部分是有效值吗?还是需要在软件数据处理中对于大于70G数据都是无效数据处理呢? (2)是我们通过精密
16405的几个问题: 1)硬件接线: RST管脚要不要接一个复位电路?还是空着就可以了? 2)READY信号是不是能够不用,而用定时中断的方法直接从SPI读取? 3
16210读取倾角数据,对每个轴的倾角数据读取的时候,读到的数据都是0x10的原因?
16209的编程思路进行X、Y、Z轴的地址写入,但是发现没数据输出,在仔细看了
16240数据手册之后,发现有一个唤醒功能,不知道该功能怎么用。能麻烦您告诉我该
16407数据时出错,问题如下: 1:读取出的十六位数据经过换算与DATASHEET中对应数据不符,比如电压转换后只有2v左右。对应波形如下 2:数据读取data_out从1200h后一直为0,如图所示
16488 是静态时, 陀螺仪的输出噪声太大。 您的参考文献是 ATIS 16488 的音调值附在下面。 从图中可以很容易看到输出
16344和16448的手册基本是一致的)。 以下是16448采集的数据情况:从下图能够准确的看出一段时间内采集的传感
16405大概有±1°的噪声输出,对于产品性能有影响,请问有什么好的办法能降低
不动时数据一直跳动,最大和最小能差上百个数,在振动测试时发现测得数据又偏小。请问有没有完整的传感
16227CMLZ安装在振动源附近后,应该使用什么数据线把它和电脑连接起来?
1644X/FLEX在哪可以买到,自己做的话两个电容是多大的,两排管脚什么型号,有没有关于
设置 根据DataSheet中 SPECIFICATIONS关于NOISE PERFORMANCE一栏以及Table展示:
16365的陀螺漂移比较小,大约零点几度每秒,但较大的晃动后再静止,漂移变大,能达到约10度每秒,不知是什么原因,是
16488输出异常!寻求技术人员帮助。 下图为16488加速度X在双轴转到绕Y轴翻转,敏感重力加速度的分量输出过程。另外其他轴表现同样现象 问题:翻转过程中,为什么出现阶梯状,是不是内部自补偿引起的??还望解答。谢谢
16006的SPI与dsp28335的SPI连接,28335的时钟配置的四种方案和
16006的时序图在附件里,28335的SPI是否应该选第三种(加红框)?若不是,麻烦
我想在默认配置情况下(内部时钟采样2048hz,DEC_RATE=0)通过DR中断读取
恢复到初始化设置、进行工厂校准恢复、以及清除闪存等等。 我在GLOB_CMD寄存
16448做IMU和GPS的融合。IMU主要是完成卡尔曼滤波里预测的步骤,所以我需要为我的IMU设置系统噪声参数Q。然而在
的SPI数据通过SPI转串口接到上位机,上位机通过labview软件读取
最开始数据读取时准确正常的,后来不小心电路板不知道哪里短路,数据依然能够读取,但导致
16488通过SPI通信,连接图和官方手册一样,供电为3.3V,先去用SPI读取传感
的PROD_ID,按照手册上写的,如果读取为0X4068,则代表SPI协议读取正确
仿真调试,全速运行,Rxbuffer的数据不变化,单步调试时,有变化,不知问题出在哪里了? 如下波形图: CS与sclk波形
16465启动后,由于温度没有稳定,零偏会偏移,直到工作时候的温度稳定。这一段时间大概有20分钟,想问这个零偏怎么补呢?
16365的默认系统设置,读取陀螺仪的测量值。 为了验证读数是不是正确,在读取陀螺仪的过程中将
的值都变成FFFF,重新插拔16488到评估板上可能还好用,但过些时间又发生同样的问题,如图所示,请问这是什么原因那?
16477时,静止状态下所测量的数据变化范围很小,同时在平滑路面上进行动态测试效果也还不错,今本上和
16209_Sendbyte(uint8_t byte) { uint8_t d_read,d_send = byte
16445的数据。但是再通过SPI通信读取Port ID这里出现了问题,希望有人能帮忙解决,或给些建议。问题描述如下: 这是我编写的读取Port ID部分
16475在突发模式下可以将CS信号持续拉低吗 2.我的16475上电后DR信号只有1个高电平,就再也没拉起来过,这正常吗??? 谢谢 期待回复
数据都正常。 但3个轴向的陀螺高位输出数据很大,在几十到几百。请看看是什么原因?
16495是一款完整的惯性系统,内置一个三轴陀螺仪和一个三轴加速度计。
16490iSensor®器件是一款完整的惯性系统,内置一个三轴陀螺仪和一个三轴加速度计。
16477是一款精密、微型MEMS惯性测量单元(IMU),内置一个三轴陀螺仪和一个三轴加速度计。
16475是一款完整的惯性系统,内置一个三轴陀螺仪和一个三轴加速度计。
16507 是一款精密的微型微机电系统(MEMS) 惯性测量单元(IMU),它包括一个三轴陀螺仪和一个三轴加速度计。
16505 是一款精密的微型微机电系统 (MEMS) 惯性测量单元 (IMU),它包括一个三轴陀螺仪和一个三轴加速度计。
16500 是一款精密的微型微机电系统 (MEMS) 惯性测量单元 (IMU)。它包括一个三轴陀螺仪和一个三轴加速度计。
边缘部署及业务快速上线,并能在无机房场景部署边缘应用。 边缘一体机主要组成部分包括服务器、交换机、配电箱、PDU、UPS、电池包、机架式空调、应急风扇、监控显示屏、监控主机、动环
16229 iSensor™ Accelerometer, 2 Axis Sensor Evaluation Board
16228 iSensor™ Vibration, Accelerometer Sensor Evaluation Board
16448 iMEMS®, iSensor™ Accelerometer, Gyroscope, Magnetometer, Pressure, Temperature Sensor Evaluation Board
16240 iMEMS®, iSensor™ Accelerometer, 3 Axis Sensor Evaluation Board
16223 iMEMS®, iSensor™ Vibration, Accelerometer Sensor Evaluation Board
.png)
.png)